東洋経済の記事で面白いものを見つけましたので掲載しておきます。
https://toyokeizai.net/articles/-/442691
以下抜粋です。

旅行や出張でジェット旅客機に乗客として乗ったことがある人は多いでしょう。そのとき、多くの場合、2大メーカーのボーイングかエアバスの機体に乗ることになります。この2大メーカーの旅客機は、自分がお客さんとして乗る分には大きな違いを感じないかもしれませんが、パイロットの視点で見ると設計思想が大きく異なります。
3次元を飛ぶ飛行機には、①補助翼(エルロン)、②昇降舵(エレベータ)、③方向舵(ラダー)の3つの舵が必要です。それらの舵面を動かすため、昔は、「ケーブルでアクチュエーター(作動装置)を制御して動かす方式」でしたが、現在は「デジタル信号に変換しワイヤ(電線)でクチュエーターを制御する方式」であるフライ・バイ・ワイヤ(FBW)が主流です。
フライ・バイ・ワイヤでは、飛行を制御するコンピュータが、他システムから取得した情報(飛行速度、飛行高度、飛行形態、エンジン・データなど)から効率的に旋回するために必要な補助翼や昇降舵などの舵角を算出して作動させます。
そのため、操縦輪を回すだけで効率よく旋回でき、操縦桿を引く操作や当て舵も必要ありません。これにより登場したのがサイドスティックです(図1)。
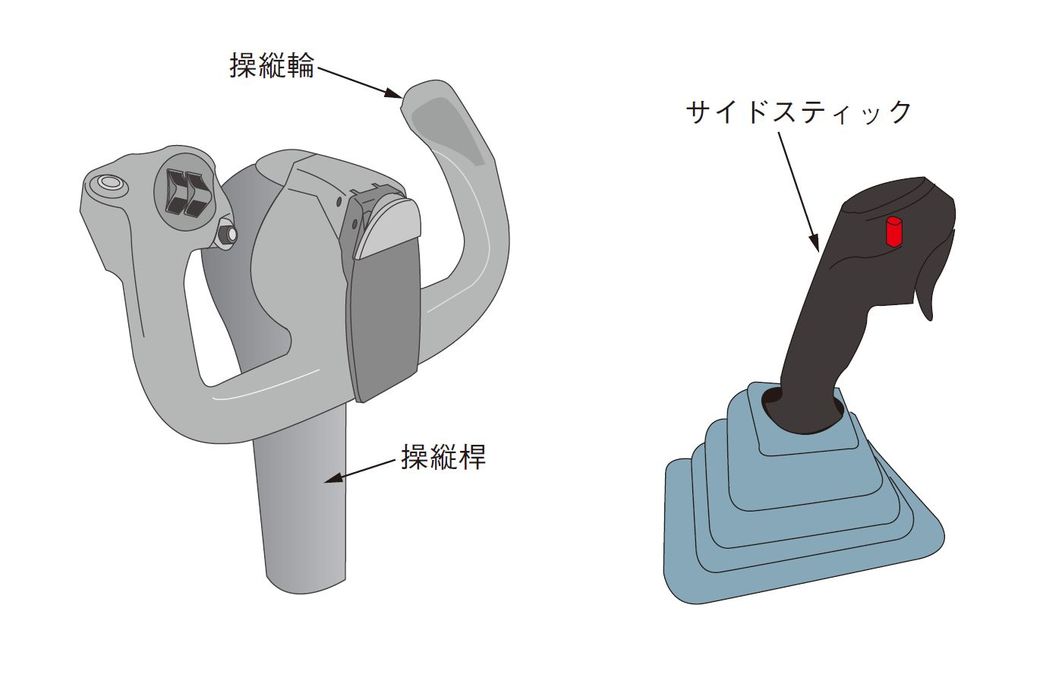
フライ・バイ・ワイヤには、これ以外にも多くの利点があるため現在の主流となっていますが、なぜボーイングはフライ・バイ・ワイヤを採用しても従来型の操縦桿を残したのでしょうか?
その理由の1つは、ボーイングの「パイロットの過去における訓練と運航経験を重要視する」という設計思想です。パイロットの基礎訓練では操縦桿の飛行機が多く、不測の事態に遭遇したときには訓練時代から感覚的に身についている操縦桿のほうがよいと考えているわけです。
さらに、新技術や新機能を持つ装置の導入では、「明確に機能し効率的な利点がある」「パイロットに有害な影響を与えるインタフェースではない」という考え方も影響しているようです。サイドスティックは、設置側の手が怪我などで動かくなってしまうと操縦が困難になるリスクがあります。
このように、サイドスティックは万が一の場合、パイロットに有害な影響を与えるインタフェースとなる可能性があるため、どちらの手でも操縦可能な操縦桿を残したと思われます。
ボーイングとエアバスの設計思想の違い
また、ボーイングは「飛行を制御する最終的な権限はパイロットにある」という設計思想です。一方のエアバスは「飛行を制御する権限は、通常の運用限界範囲内においてのみ」という設計思想です。つまり、エアバスは「パイロットといえども運用限界を超えて飛行する権限はない」と考えていることになります。
パイロットの飛行を制御する権限が違う例を挙げてみましょう。例えば、エアバスではバンク角の制限である33°を超えると警報を発しますが、それを無視してサイドスティックをさらに操作し続けても67°以上のバンク角にはならないようになっています。それに対して、ボーイングはバンク角が30°を超えると、メッセージ表示や操縦輪が重くなるなどの警告機能はありますが、自動停止の機能はありません。つまり、警告よりも強い力で操縦輪を回せば、思いのままのバンク角にできるのです。
この大きな違いは、ボーイングが「自動化はあくまでも援助のためであり、パイロットに置き換わるものではない」と考えているからです。過去に次のような事例がありました。
ある旅客機が、離陸直後に「ダウンバースト」と呼ばれる強烈な下降気流に遭遇しました。
このとき、同機のパイロットは、最大離陸推力の制限を超えてエンジン出力を増加させ、かつ失速警報装置を無視し続け、揚力係数が最大となる速度まで減速して飛行したのです。これにより下降気流に負けない推力と揚力を確保して安全に回避できました。この事例のように、ボーイングは、不測の事態においては、机上で想定したコンピュータ・プログラムよりも、機上で緊急事態に遭遇しているパイロットの判断を優先させたほうが最良となる場合があると考えているのです。
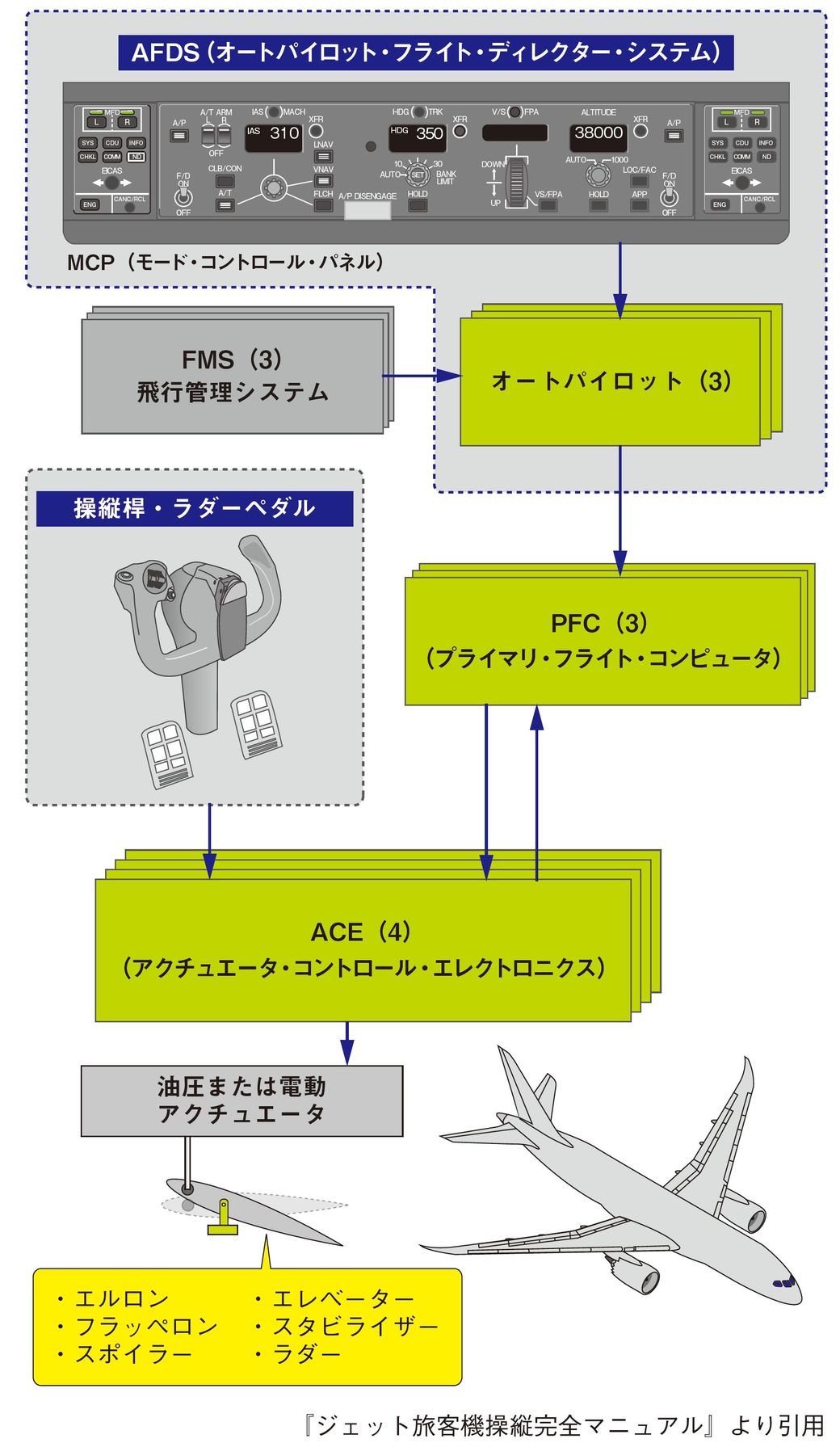
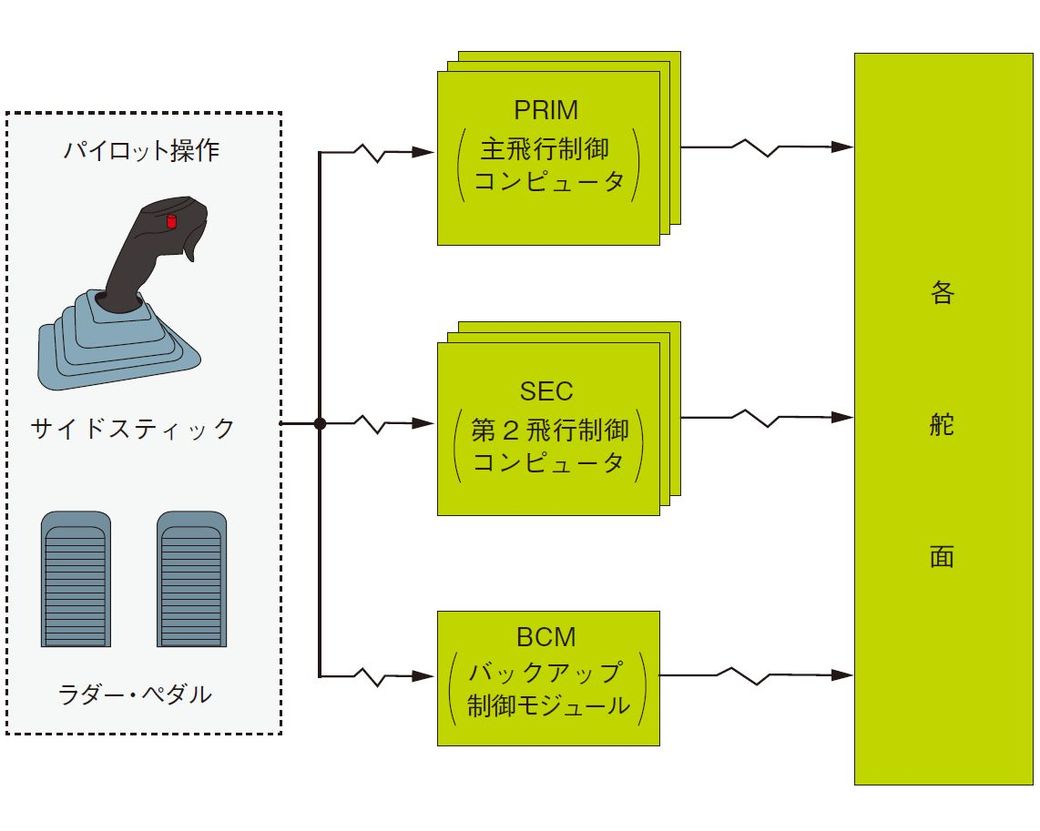
エアバスA350の場合、パイロットによる操作信号は主飛行制御コンピュータ(PRIM)に直接入力されます(図2)。一方、ボーイング787の場合、パイロットの操作信号は、まず舵面アクチュエーターを制御する装置(ACE)に入ります(図3)。主飛行制御コンピュータ(PFC)は、ACEからの操作信号をもとに、舵角を算出してACEに返します。ACEは、その舵角になるように各舵面を作動させています。
このように、わざわざ演算部門と制御部門に分けているのは、最終的にはパイロットがコンピュータを介さず直接アクチュエーターを制御して舵角を自由に決められるようにするためです。
さらに、オートパイロットや自動推力装置においてもボーイングとエアバスには違いがあります。
ボーイングの場合は、オートパイロットで飛行していても主飛行制御コンピュータ(PFC)が算出したそれぞれの舵角に見合うように、バックドライブ・アクチュエーターと呼ばれる作動装置で、操縦桿、操縦輪、ラダー・ペダルが動くようになっています。
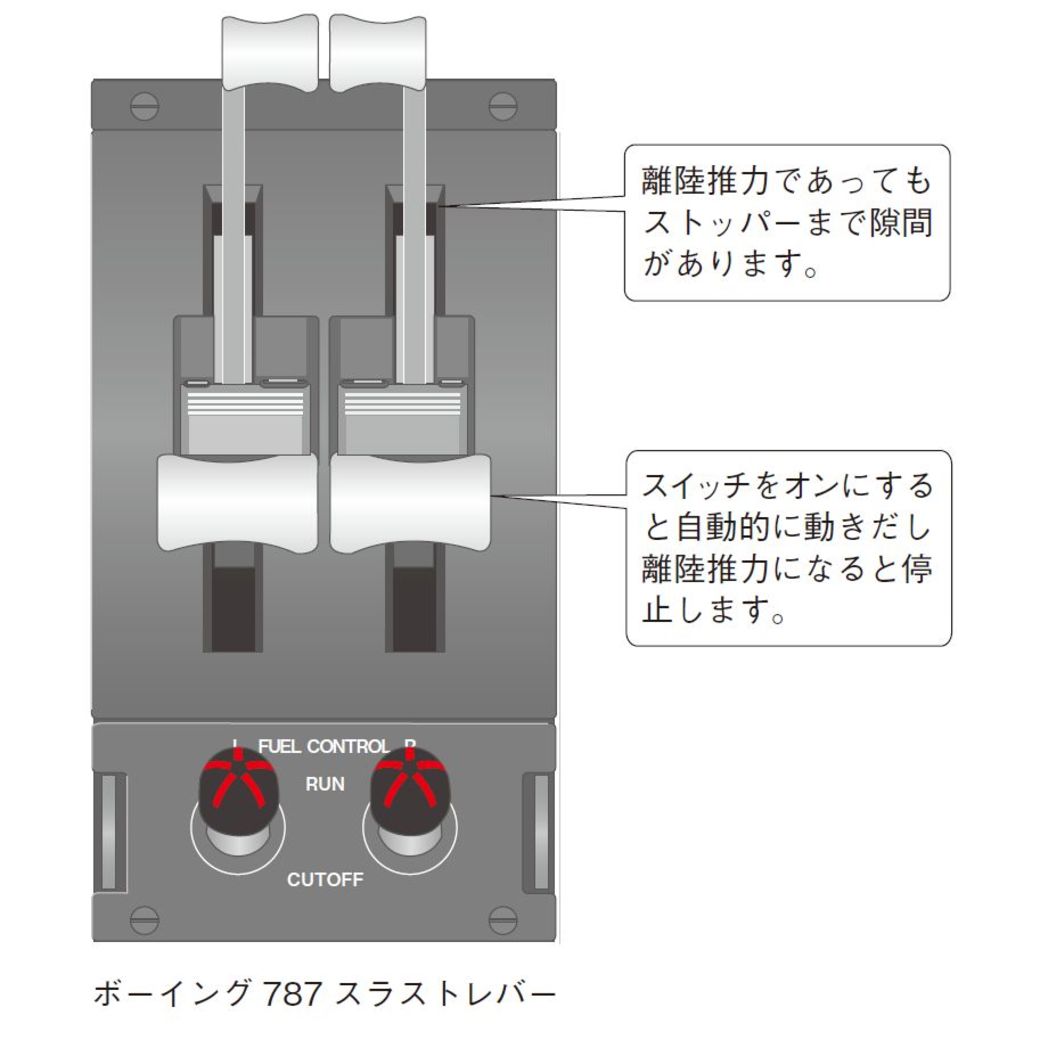
これはオートパイロットによる自動飛行中であっても、パイロットが直感的に飛行状況を把握できるようにするためです。同じ考え方からスラストレバーもエンジン出力状況に合わせて動くようになっています(図4)。
一方、エアバスはオートパイロット中にサイドスティックが動くようなシステムではありません。
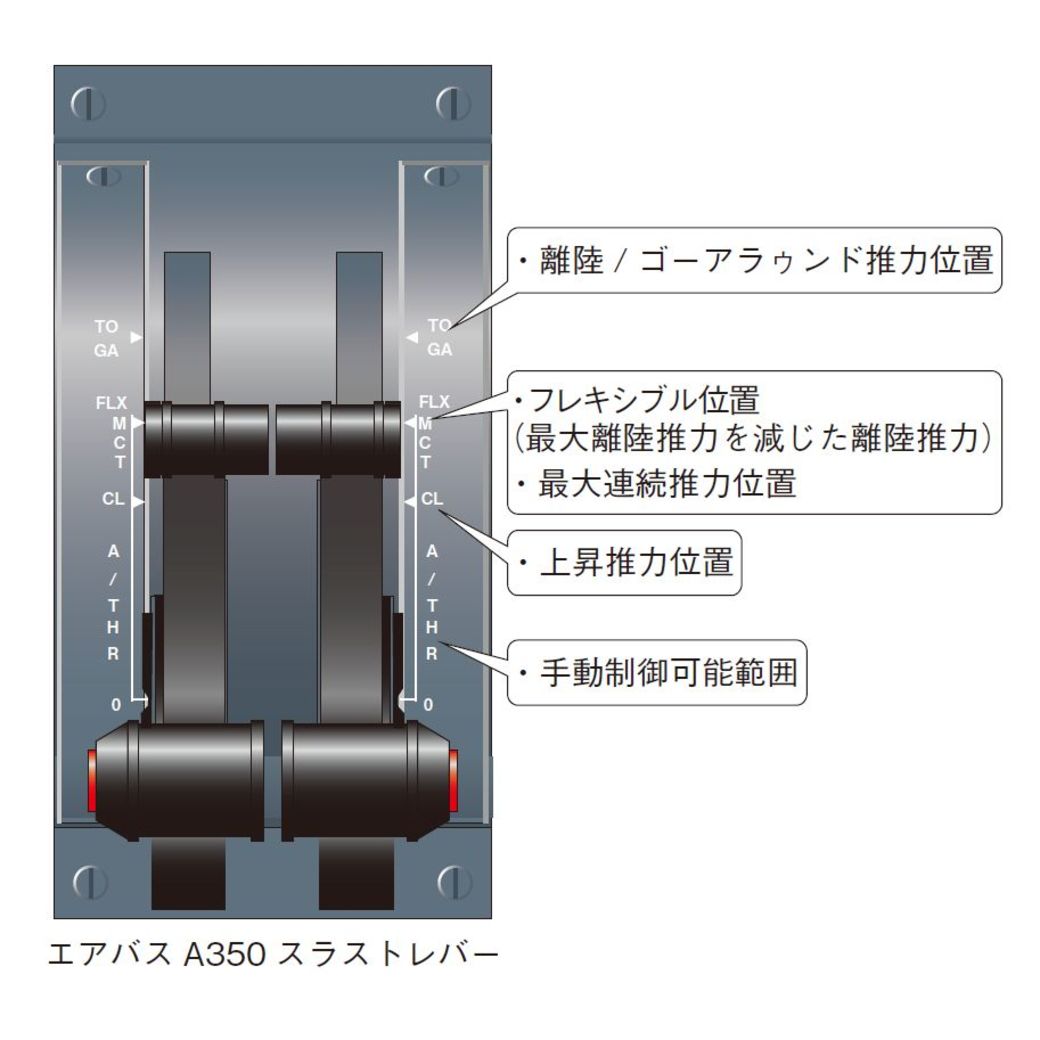
また、スラストレバーは離陸推力位置、上昇推力位置などが決まっており、パイロットがその位置まで手動で動かして出力を決定しています(図5)。乱暴にいえば、スラストレバーは一種の「スイッチ」のような役割であり、出力状況に合わせて動くことはありません。